TemaFinale25¶
A Maritime Cargo shipping company (fron now on, simply company) intends to automate the operations of load of freight in the ship’s cargo hold (or simply hold). To this end, the company plans to employ a Differential Drive Robot (from now, called cargorobot) for the loading of goods (named products) in the ship’s hold.
The products to be loaded must be placed in a container of predefined dimensions and registered,
by specifying its weight, within a database,
by using a proper service (productservice). After the registration, the productservice returns a
unique product identifier as a natural number PID, PID>0.
The hold is a rectangular, flat area with an Input/Output port (IOPort).
The area provides 4 slots for the product containers.
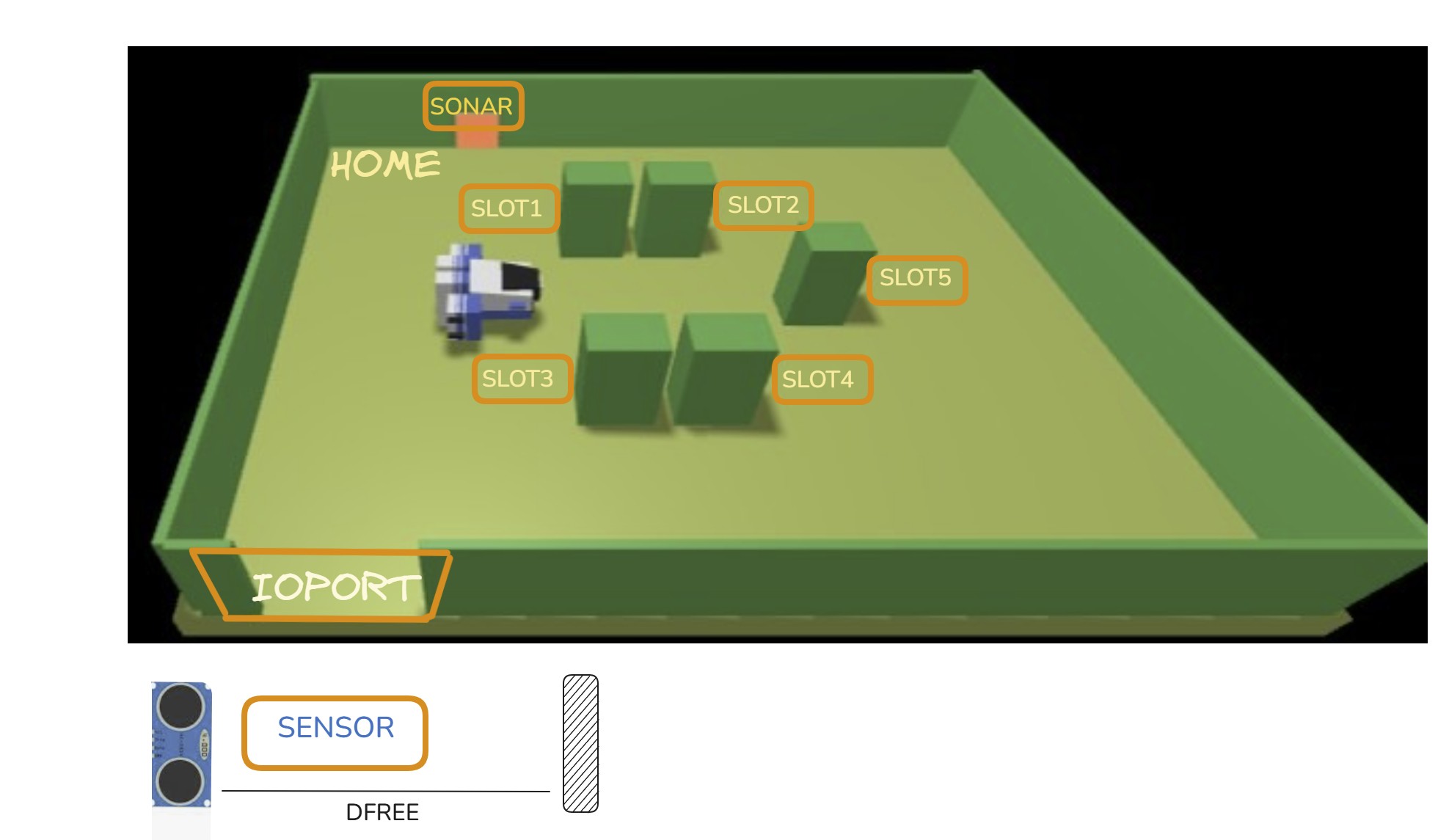
In the picture above:
The depict the hold storage areas, when they are ocuupied by product containes
The area is permanentely occupied, while the other slots are initially empty
The put in front of the IOPort is a sonar used to detect the presence of a product container, when it measures a distance
D, such thatD < DFREE/2, during a reasonable time (e.g.3secs).
TF2025 Requirements¶
The company asks us to build a software systems (named cargoservice) that:
is able to receive the request to load on the cargo a product container already registered in the productservice.
The request is rejected when:
the product-weight is evaluated too high, since the ship can carry a maximum load of
MaxLoad>0 kg.the hold is already full, i.e. the
4 slotsare alrready occupied.
If the request is accepted, the cargoservice associates a slot to the product
PIDand returns the name of the reserved slot. Afttwerds, it waits that the product container is delivered to the ioport. In the meantime, other requests are not elaborated.is able to detect (by means of the sonar ) the presence of the product container at the ioport
is able to ensure that the product container is placed by the cargorobot within its reserved slot. At the end of the work:
the cargorobot should returns to its HOME location.
the cargoservice can process another load-request
is able to show the current state of the hold, by mesans of a dynamically updated .
interrupts any activity and turns on a led if the sonar sensor measures a distance
D > DFREEfor at least3secs (perhaps a sonar failure). The service continues its activities as soon as the sonar measures a distanceD <= DFREE.